This project aims to design, build, and test a functional drone using the Quadrino Nano Flight Controller, with the ultimate goal of creating a versatile aerial platform. The first phase focuses on building and tuning a robust drone capable of stable flight, while the second phase incorporates computer vision and marker-based tracking inspired by pennsylvania university labs. The project is guided by the constraints of cost, material availability at the university lab, and the practicality of components.
Process
Research:
- Studied drone kinematics, control algorithms, and flight dynamics.
- Analyzed existing open-source solutions like ArduPilot and PX4.
Choice of Materials:
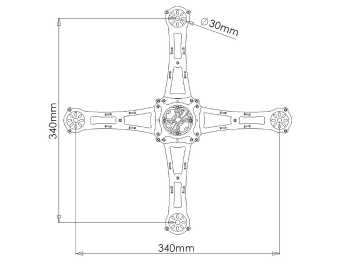
1. Frame
- Choice: Crazy2Fly Frame.
- Reasoning: Balancing strength and weight for better flight efficiency.


2. Motors
- Choice: T-Motor Navigator MN3110 470KV
- Reasoning: High efficiency and power-to-weight ratio, necessary for stable flight and maneuverability.

3. ESCs (Electronic Speed Controllers)
- Type: Lynxmotion 12A Multirotor ESC 1A BEC.
- Reasoning: Smooth motor control for stability during hovering and maneuvers.
4. Flight Controller
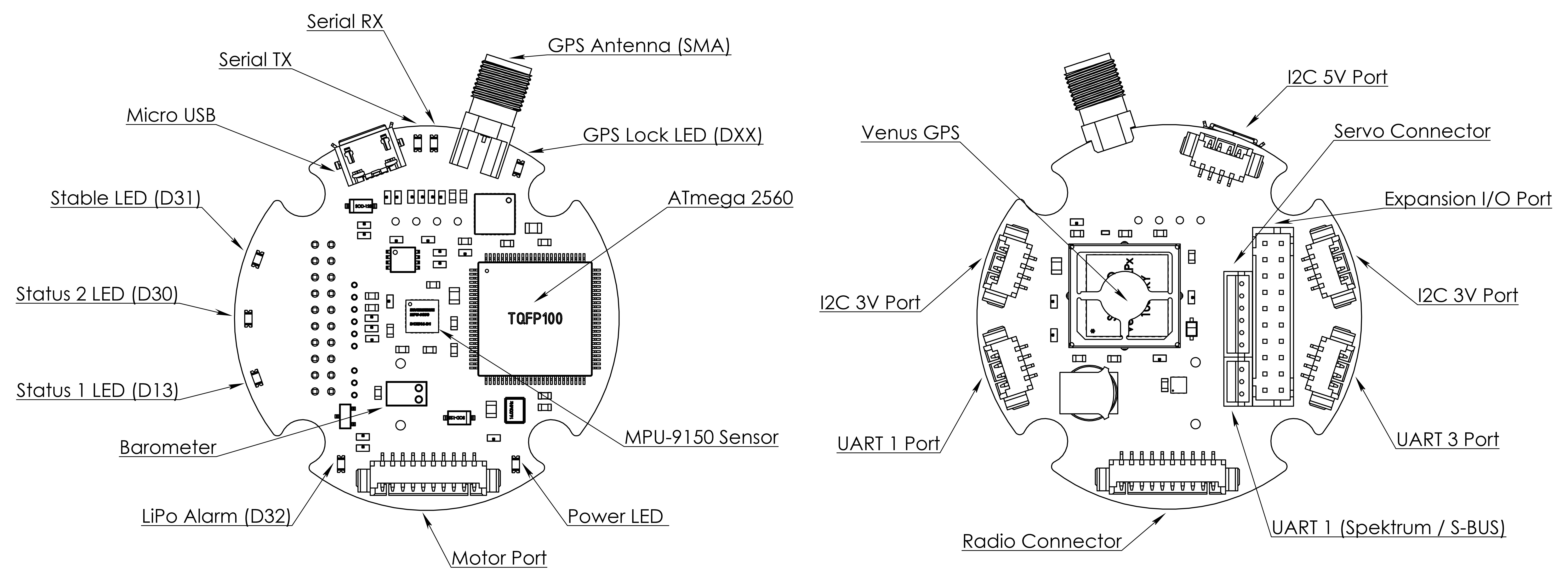
- Choice: Quadrino Nano Flight Controller.
- Reasoning: Feature-rich, cost-effective, and suitable for our educational and research objectives.
- Capabilities: PID tuning, gyro stabilization, and flexibility for adding computer vision in phase 2.
- The Lynxmotion Quadrino Nano was created as a collaboration between FlyingEinstein and Lynxmotion. It was designed to be one of the smallest MultiWii compatible flight controllers on the market. The board includes many additional features normally reserved to much more expensive flight controllers, such as cutting-edge sensors, integrated GPS, easy to use software and a case with vibration damping.
5. Controller Radio
- Choice: FLYSKY FS-i6 Transmitter & Receiver
- Reasoning: Budget-friendly option with sufficient channels for drone control.
- FS-i6 Transmitter
- FS-i6 Receiver

7. Battery
- Choice: Lipo 3S 4000mah 11.1V 60C.


Software and Coding :
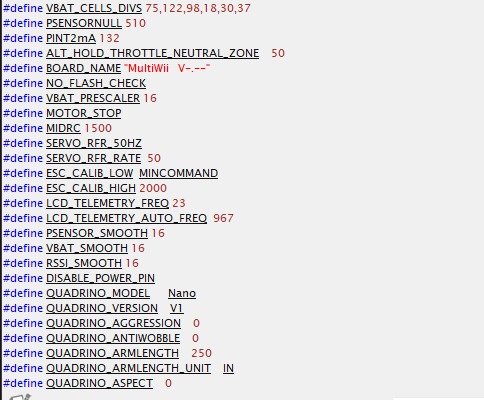
1. Firmware Config Tool
- To reconfigure and reflash the firmware on the Quadrino board

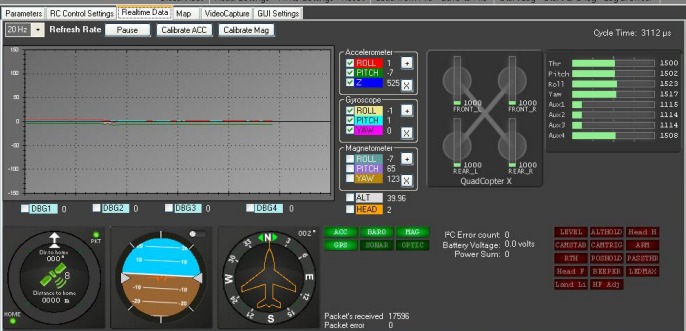
2. Sensor Calibration
- Gyro and accelerometer calibration performed via software tool.
- Ensured accurate data for stabilization algorithms.
3. Code for Control
- Language: C++ based config tool for more calibration.
- Implementation: Adjustments made for stability and initial PID values.
Mathematical Modeling and Simulation :
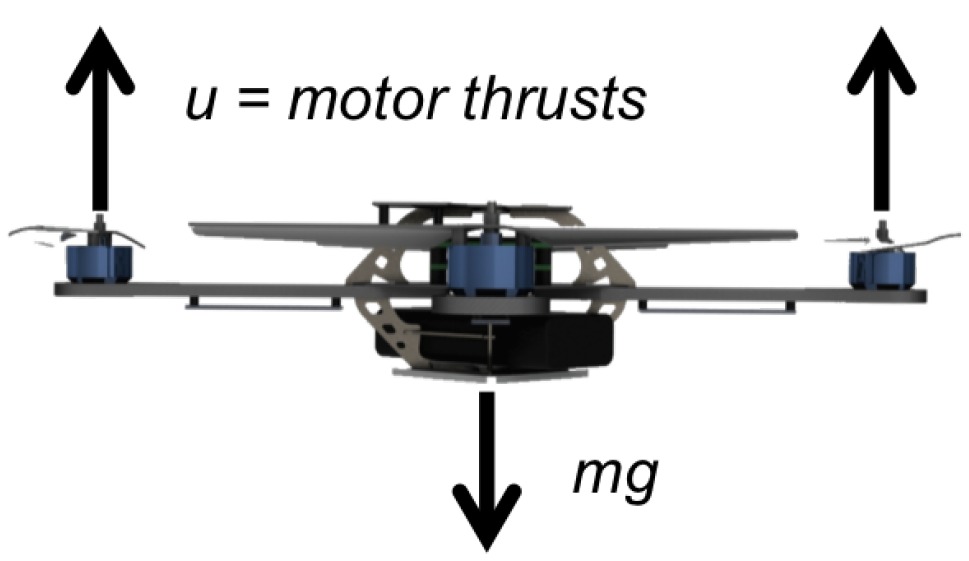
1D Model
The dynamic equation for the motion of the quadrotor in the z-direction is:
ż̇ = u / m - g
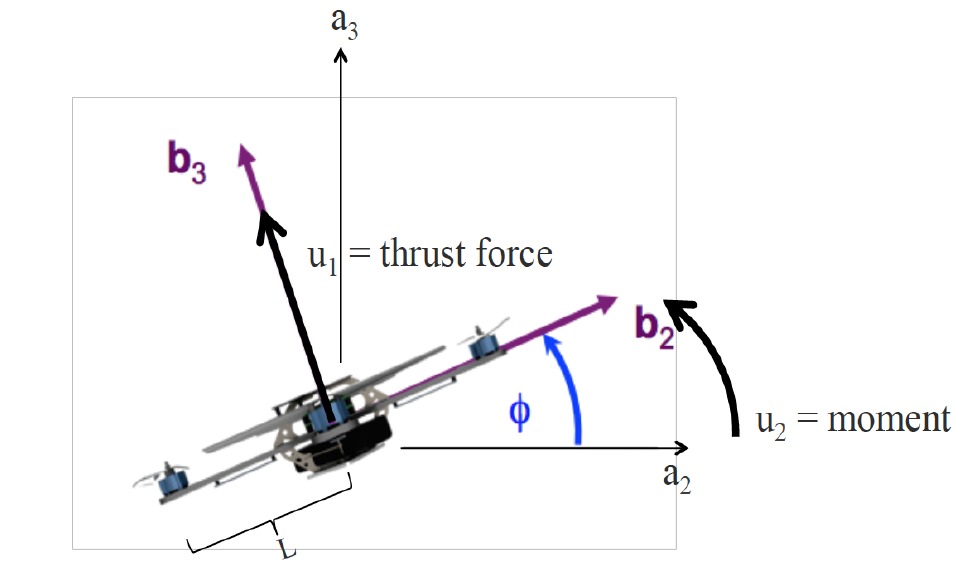
2D Model
In the planar model of the quadrotor, we only consider the thrust force on two of the rotors. The quadrotor has two inputs:
- Thrust Force (u1): This is the sum of the thrusts generated by each rotor.
u1 = Σi=12 Fi
- Moment (u2): This is proportional to the difference between the thrusts of the two rotors.
u2 = L(F1 - F2)
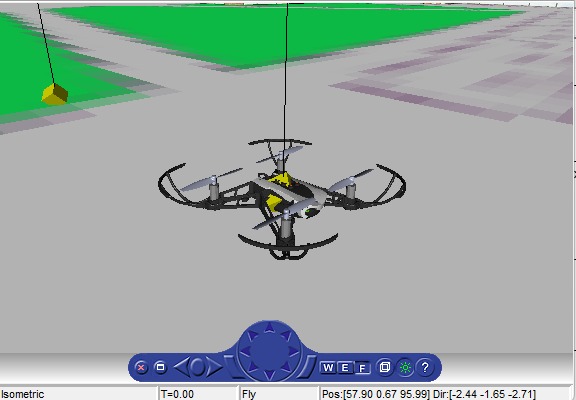
Drone Dynamics in MATLAB
- 1D Quadrotor Control
- Following a line trajectory
- Considered the thrust force in the Z Plane
- PD controller
- 2D Quadrotor Control
- Following a sine wave trajectory
- Considered the thrust force in the Y-Z Plane
- PD controller
- 3D Controller Quadrotor
- Following a line trajectory
- PID controller
- Position and Attitude Control
PID Control in Simulink
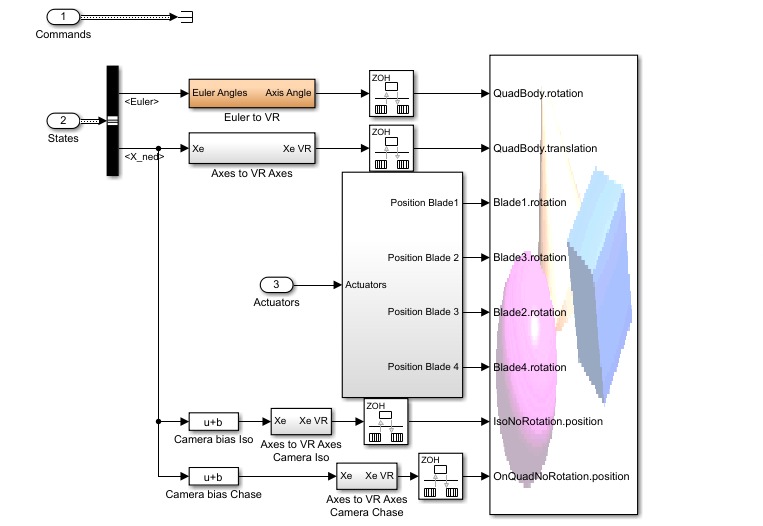
- Link to a scientific article of Imad-Naciri.
Calibration and Testing :
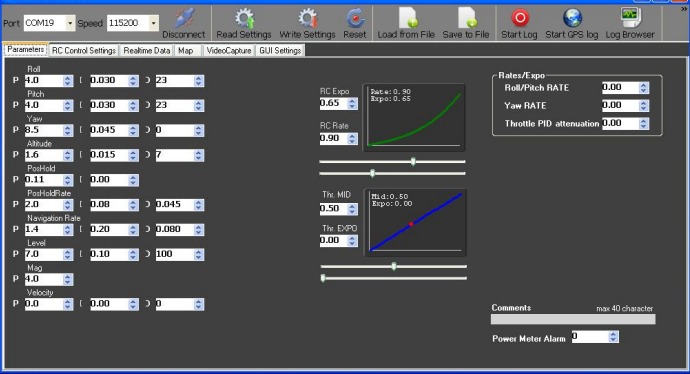
1. PID Calibration
- Calibrated PID parameters through the Quadrino Nano GUI.
- Iteratively adjusted gains for roll, pitch, and yaw stabilization.
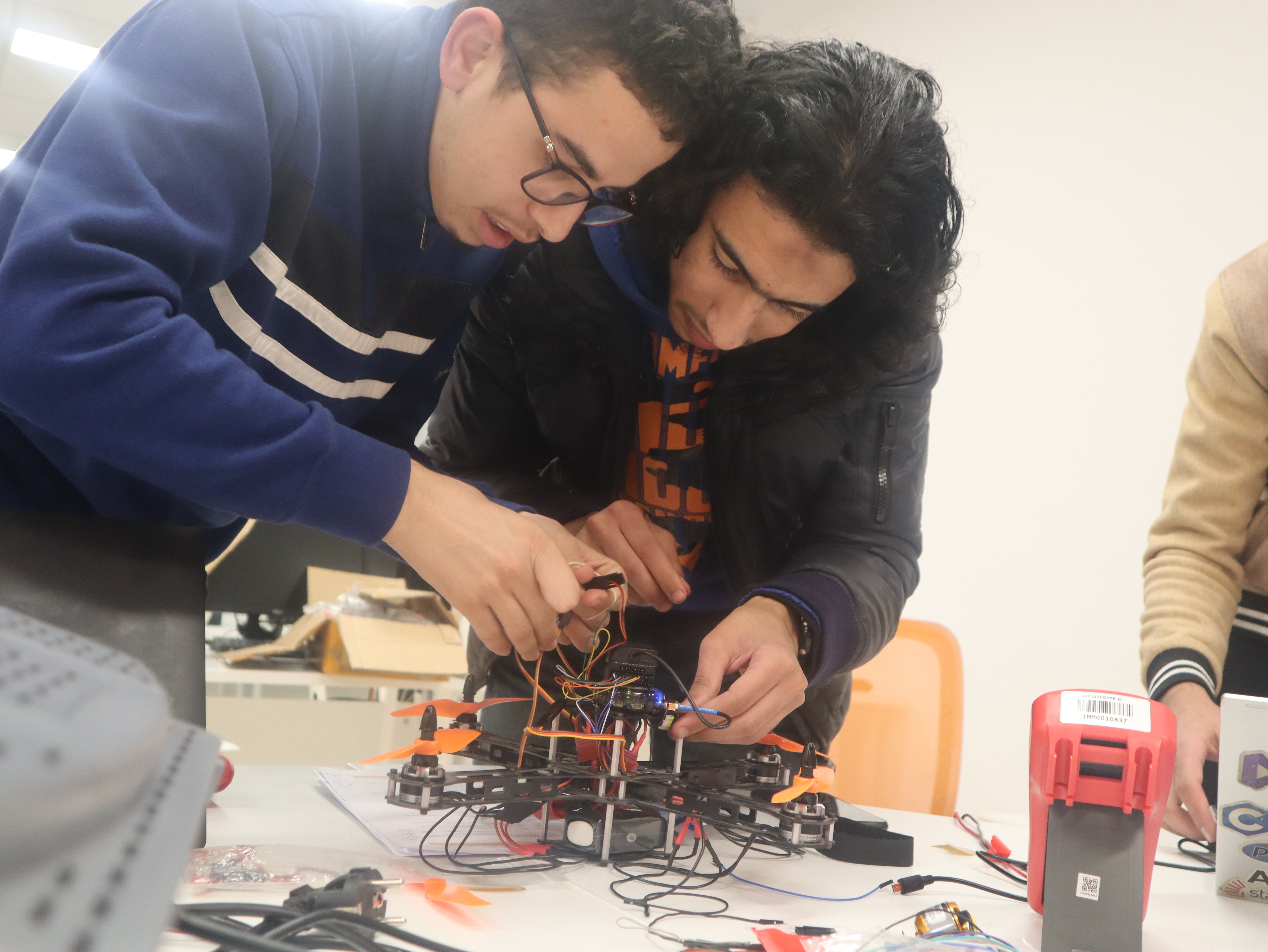
2. Testing Process
- Initial tests involved hovering and simple maneuvers.
- Analyzed response to control inputs and made adjustments to PID gains.
Experience Overview

Challenges:
- Synchronizing sensor data in real time.
- Achieving stable flight under varying environmental conditions.
Future:
- Computer Vision and Marker-Based Tracking
- Expand Applications
- Explore applications in education, research, and autonomous navigation.
- Use the platform to test innovative control algorithms.
- Investigate model predictive control or adaptive control for enhanced stability and performance.
Contributors
- Imad-Eddine Naciri
- Achraf Berriane
- Mohamed Ali Chedad
- Oussama Errouji